Model Predictive Control
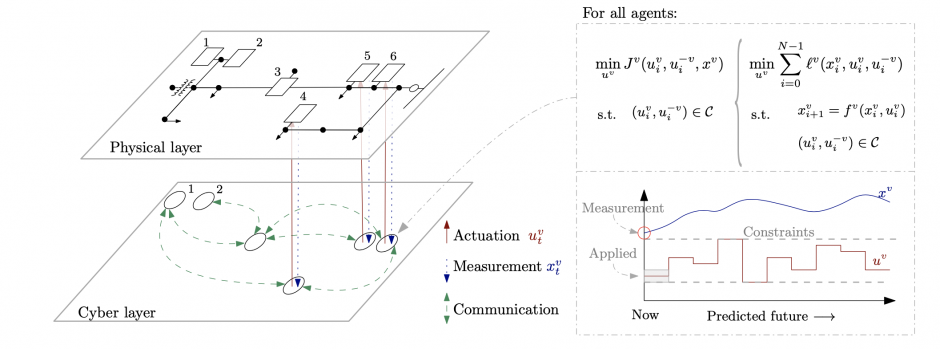
Model Predictive Control (MPC) is a modern feedback law that computes control actions by solving an optimal control problem in real-time and is capable of optimizing system performance and enforcing constraints.
I’m interested in a wide variety topics within MPC, including studying the stability and robustness of MPC in systems with non-cooperative components, designing supervisory modules that make MPC controller more reliable, and investigating the robustness of MPC implemented on embedded systems with limited computing power or distributed systems with limited communication capabilities.
Algorithmic Systems Theory
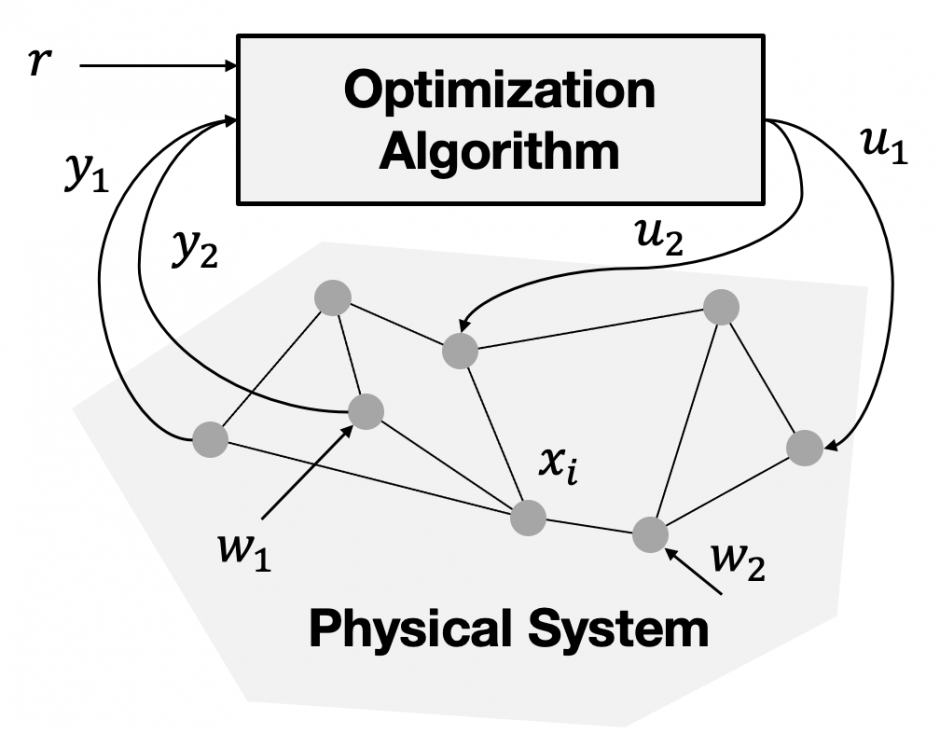
Many iterative algorithms in optimization, games, and learning can be viewed as dynamical systems with inputs (measurements, historical data, user feedback), internal states (decision variables, state estimates, Lagrange multipliers), outputs (residuals, actuator commands), and uncertainties (noise, unknown parameters). This perspective is crucial for tackling some of the challenges arising when analyzing and synthesizing the algorithms that underlie modern autonomous, AI-driven, and socio-technical systems.
I’m interested in developing new theoretical tools that synergistically build on control, optimization, game, and learning theory as well as novel algorithms and computational techniques that are specialized for noisy, time-varying, and dynamic environments.
Real-time Optimization Algorithms
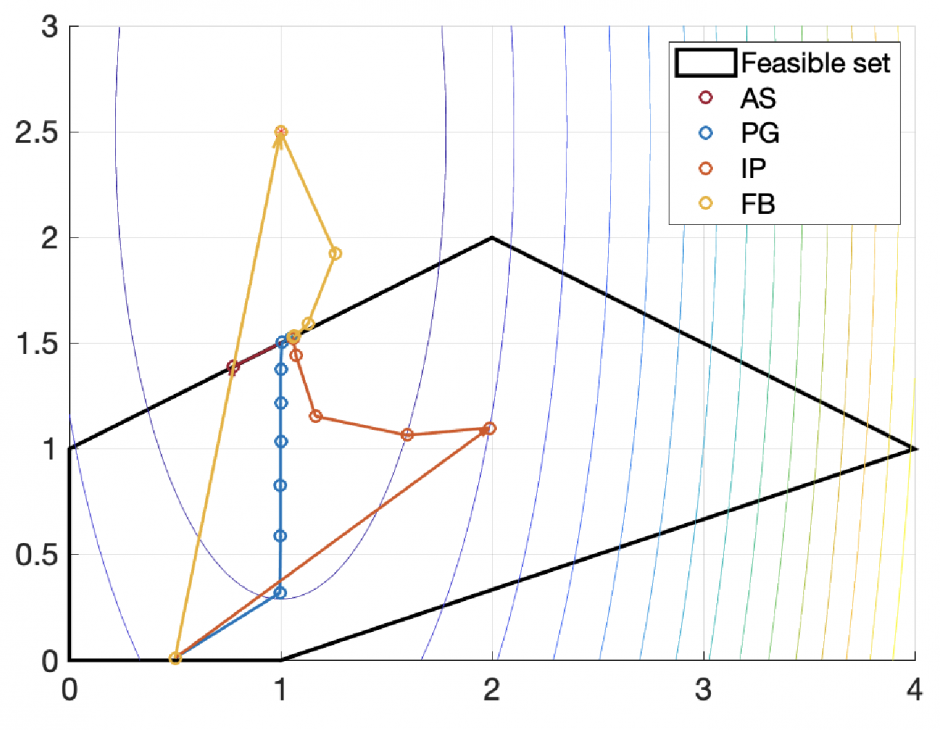
Real-time optimization algorithms are essential tools for endowing autonomous systems with complex goal oriented and self-optimizing behaviours. However, deploying optimization algorithms in safety-critical systems with limited computational and/or communication capabilities remains a challenge and the reliability and resilience of real-time optimization algorithms are significant hurdles to broader deployment.
I’m interested in developing optimization algorithms that are suited for deployment on embedded computers as well as distributed algorithms for multi-agent systems with limited communication capabilities.